
Robotics Motion Planning Week 1 and 2
Week 1
Grassfire Algorithm

- From red point to green point, like fire.
Dijkstra’s Algorithm[地接丝卡尔]

A star Algorithm[A*]
- 优先搜索距离终点最近的点
Week 2
Configuration Space[C-Space 构型空间]
- 与之相对应的还有 Work-Space
- 对于一个由一个点连接的两段悬臂,他们的旋转角度$\theta_1, $\theta_2$可以表达出悬臂所有能产生的形态
- 即通过$\theta_1,\theta_2$构成的空间表示为悬臂可能的空间
- 通过将笛卡尔体系下的Work-Space转化为C-Space,更方便求解规划问题
- 例如,对于RR arm[2R arm, 二自由度机械臂]

- 3D 的情形
Reference
Visibility Graph
-
将多边形的顶点转化为路径点,转化为路径规划问题
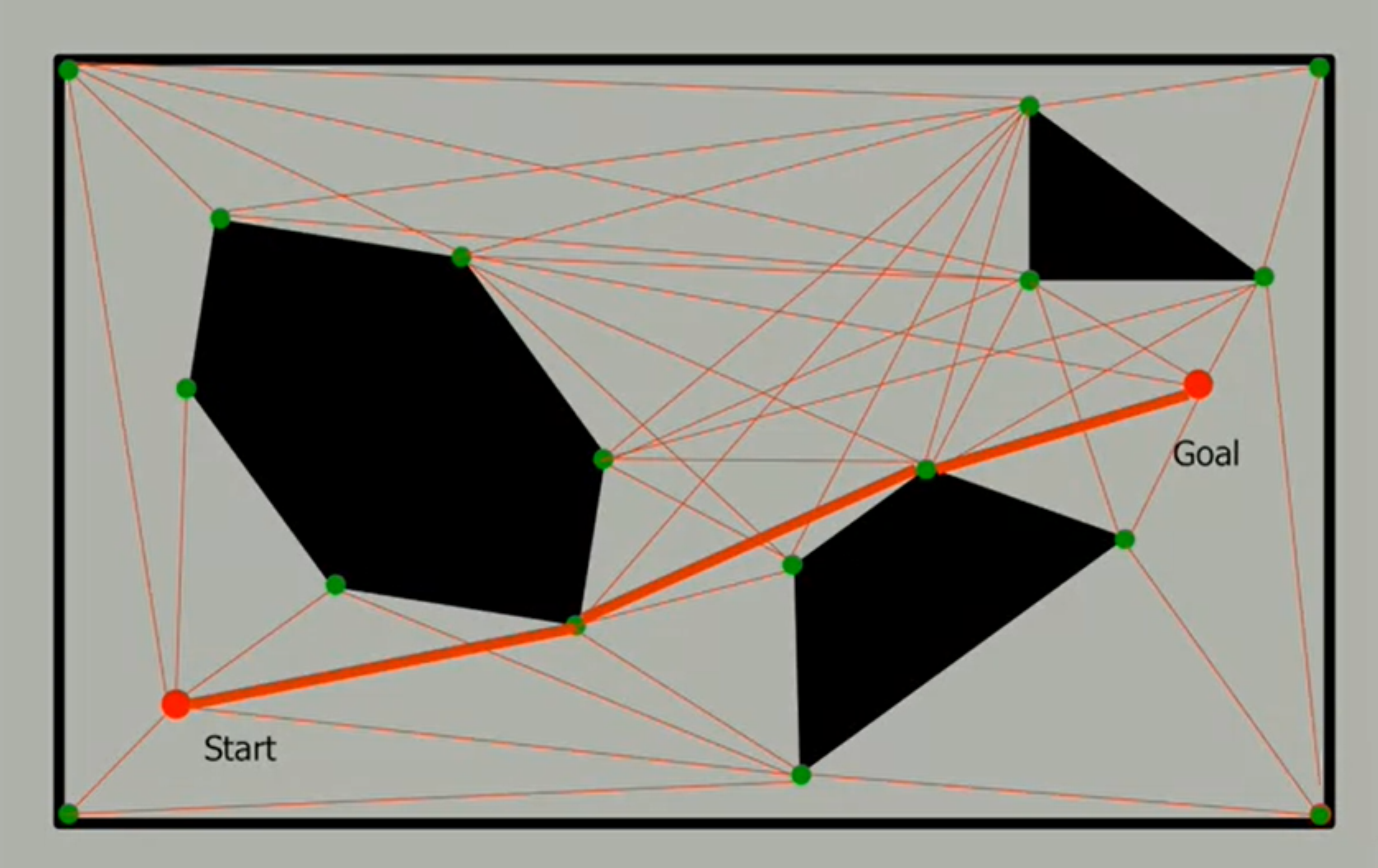
- 但是边缘行走很危险
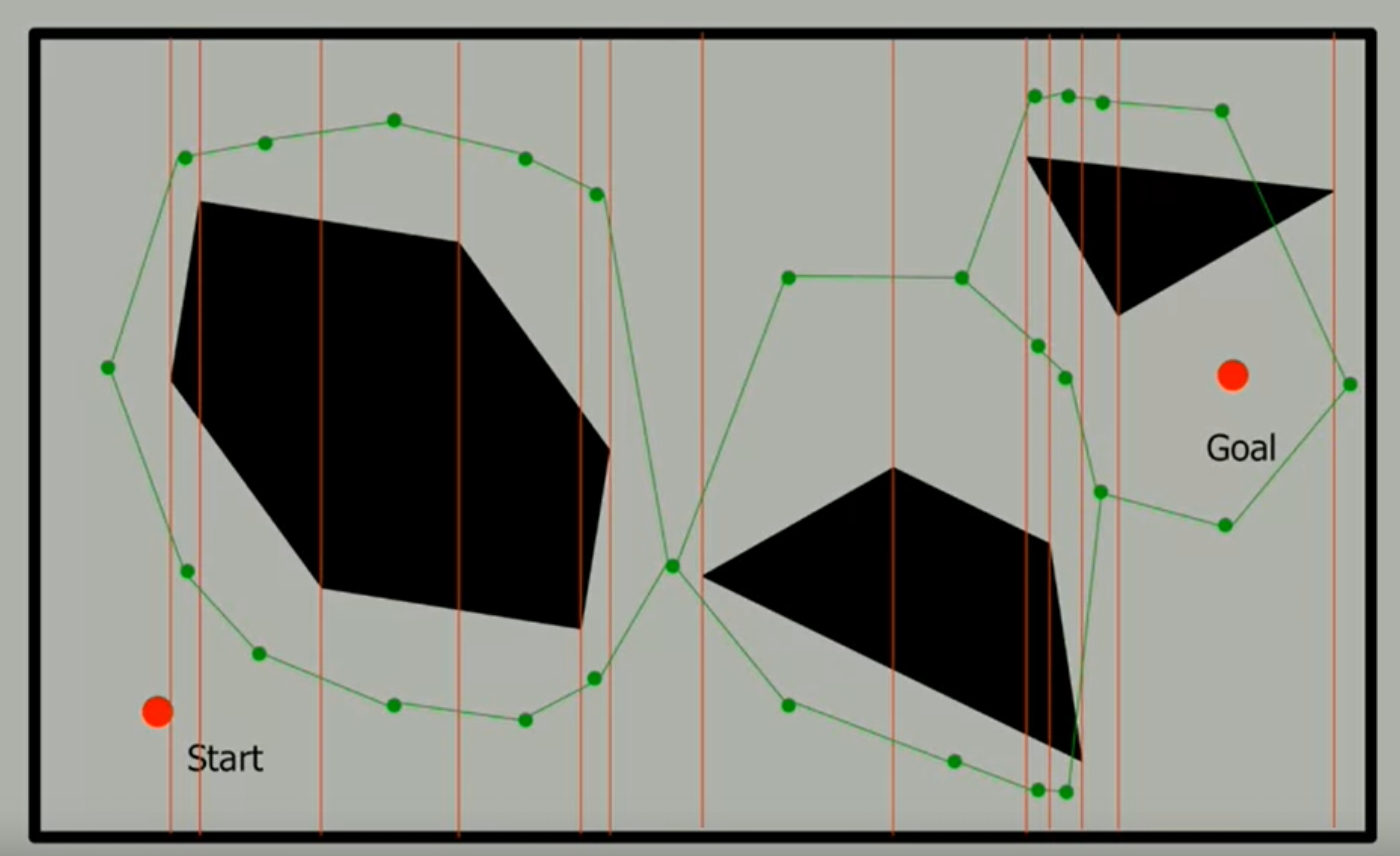
- 另一种方案是,根据多边形的顶点在X轴上将其分割为多个三角形或者梯形,在这些多边形内的直线运动是无障碍的,相应的,做出一个辅助路线图,连接两个可达的三角形或梯形的内部点,再进行路径规划
- Piano Mover’s Problem

