
Robotics-Perception-Week3
Visual Features[视觉特征提取]
SIFT [Scale-invariant feature transform] 尺度不变特征转换
- 大致思想
- 我们需要同一个相机按不同视角拍摄的同一处的画面
- 类似于全景图
- 在拼接全景图时,我们需要找到对应的特征点,才能方便图片对接
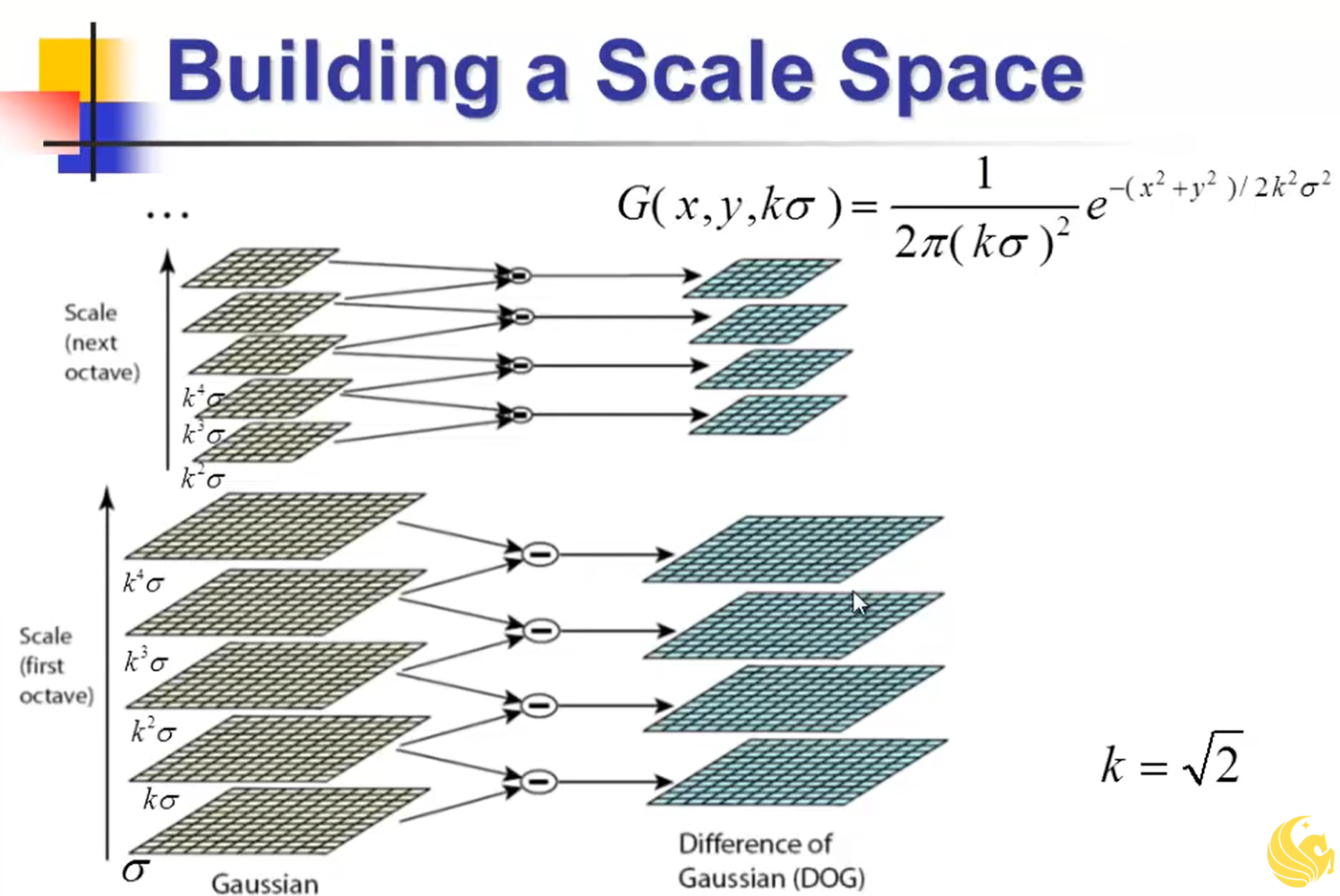
SIFT即为一种寻找特征点的算法- 对于一张图片进行不同$\sigma=1, \sqrt{2}, 2, \dotsc$的二维高斯卷积得到一组(octive)
- 再将这张图片进行降采样(隔点采样),拿到缩水的图片
- 对于缩水的图片再次进行卷积,使用的$2\sigma=2, 2\sqrt{2}, 4 \dotsc$
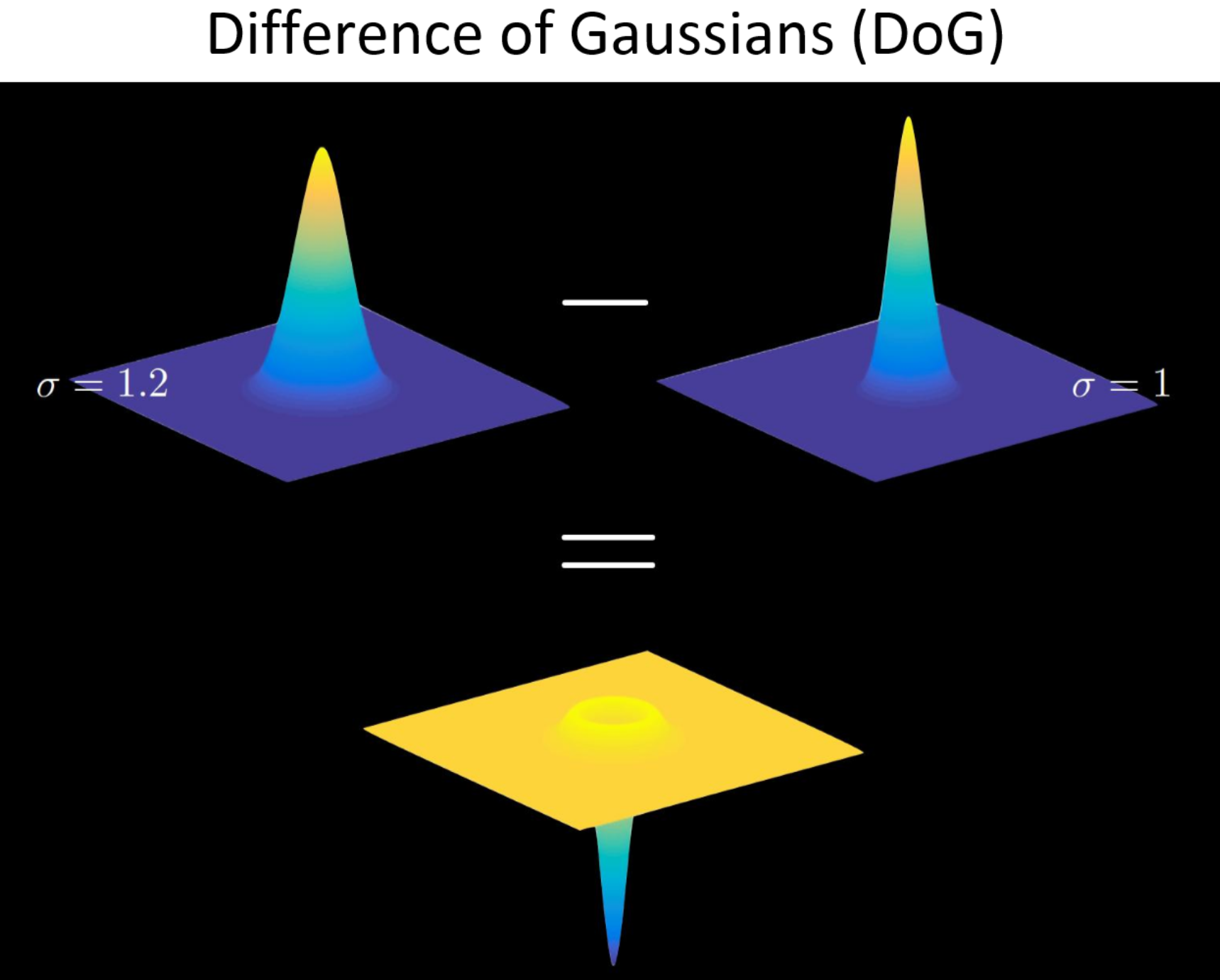
- 对于同一组(octive)的图片,相邻两张做差,得到
DoGDifference of Gaussian, 其实是一种LoGlaplacian of gaussian的近似
Gaussian pyramid[高斯金字塔]
- 迭代(高斯卷积->降采样->得到一个长宽只有$\frac{1}{2}$的图)
拉普拉斯金字塔
Sift算法中的多尺度金字塔
差分金字塔与Difference of Gaussian(DOG)高斯函数的差分
同时,需要归一化,以避免信号流式
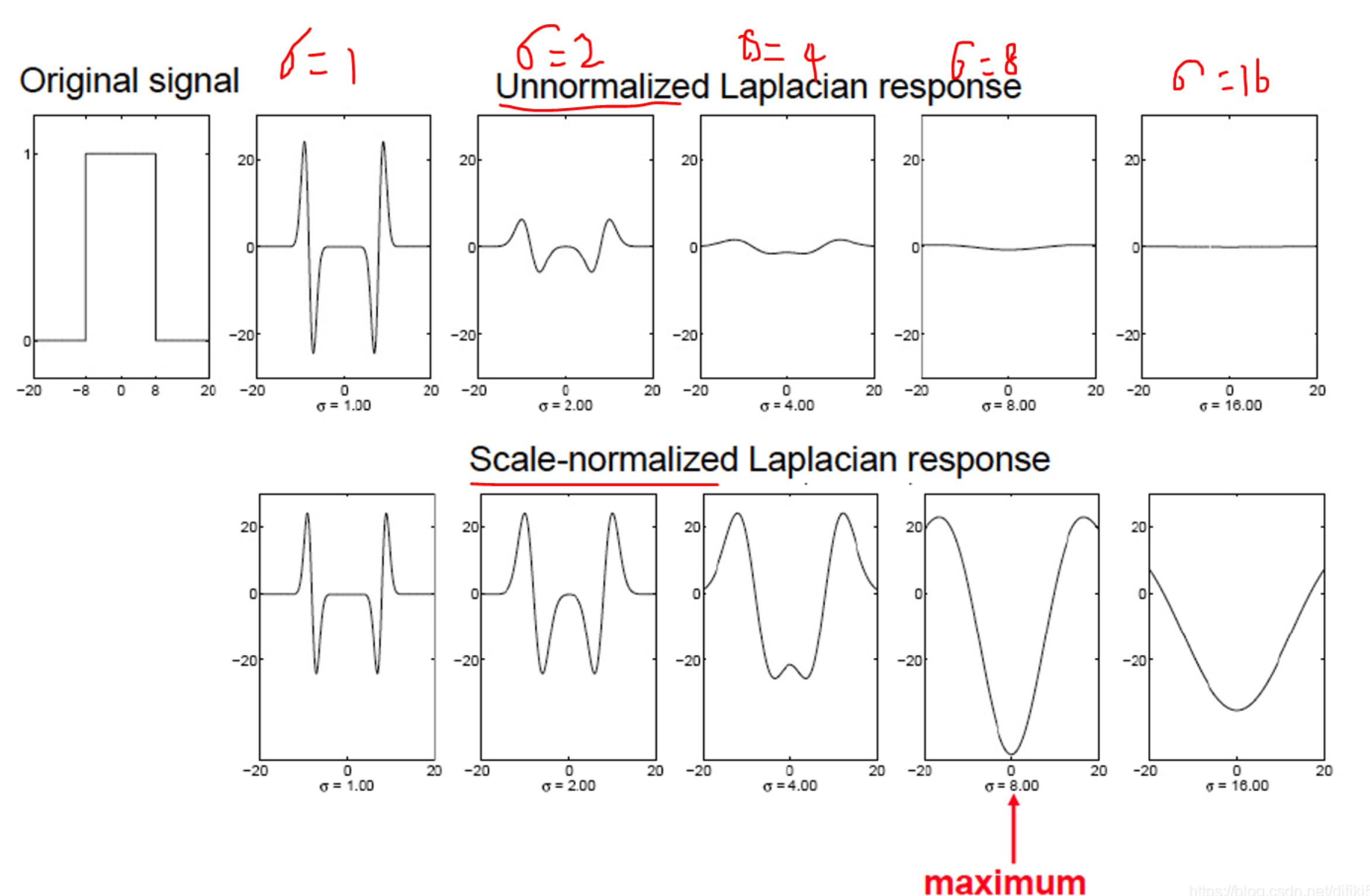
拿到的最大响应点即我们需要的特征点
Reference
- zhaoxuhui.top
- 图像特征尺度不变性-拉普拉斯-高斯差DOG-SIFT特征提取-旋转不变性-SVD分析-齐次坐标的理解-线性的理解-齐次方程的理解 CSDN
- 🤙SIFT算法详解 - zddblog[CSDN]
- 🤙SIFT算法原理详解 - Alliswell-WP[cnblogs]
- 🤙UCF Computer Vision Video Lectures 2012[5] - Dr. Mubarak Shah[Youtube]
SVD
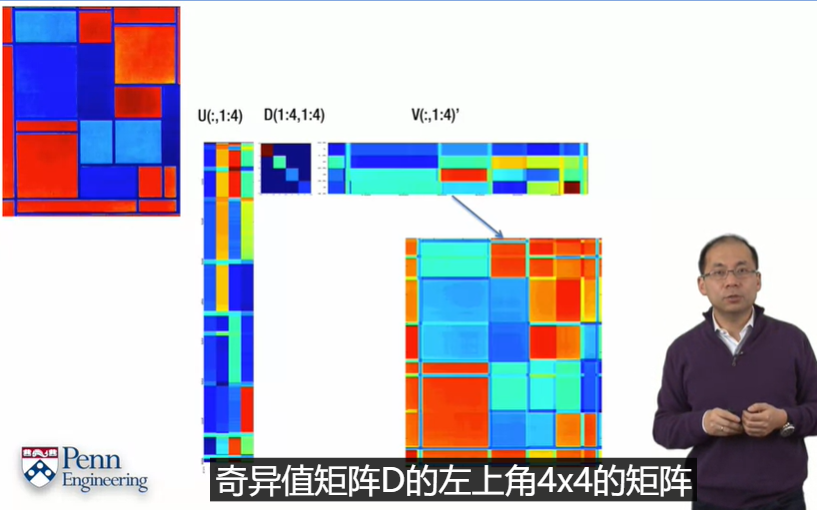
- $A_{m\times n}=U_{m\times m}D_{m\times n}V_{n\times n}^T$
- $U$, 每列正交
- $V$, 正交
平均脸
- 把每张图片按$1\times n$重新排列
- 组成一个$n\times N$的矩阵
- 通过SVD分解,拿到前几个特征,进行重构后即可

- 改变$D$的元素个数,可以更改$A$的秩
- 使$D$取倒数,则可计算$A^{-1}=VD^{-1}U^T$
- $D$非负

