
Robotics-Flight week 1 and 2
准备看点Coursera课程
- Coursera: robotics-flight
- Week 1
- State Estimation
- obtaub reliable estimates of position and velocity
- SLAM(Simultaneous Localization And Mapping)
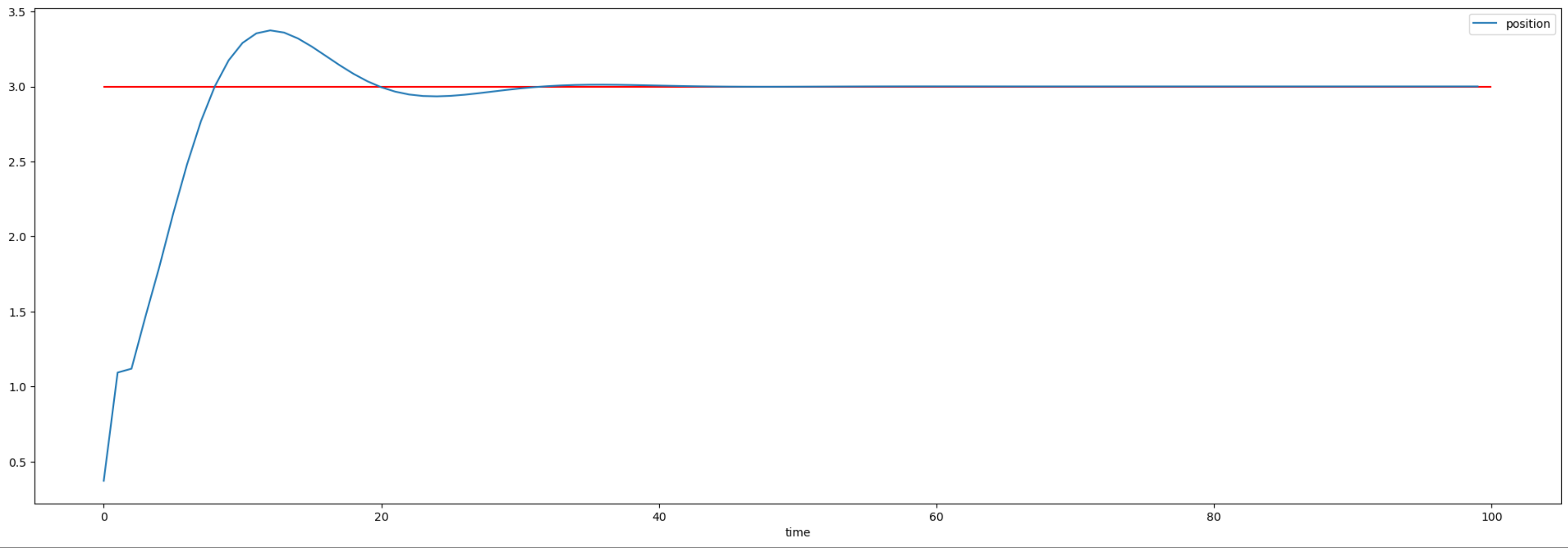
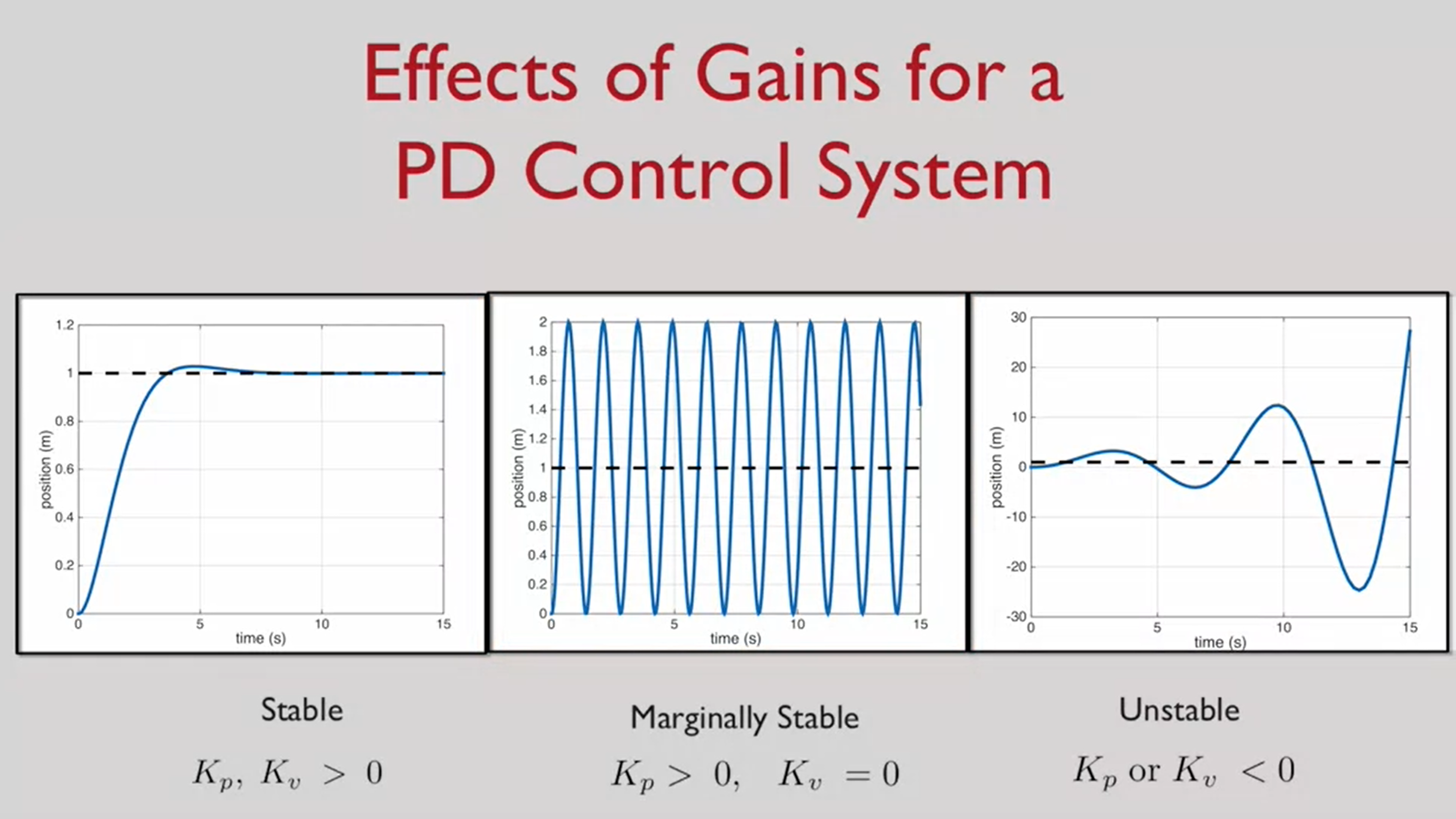
- Control for trajectory tracking in a simple second-order system
- PD control
- $u(t) = x’’^{des}(t)+K_ve’(t)+K_pe(t)$
- PID control (proportion integration differentiation)
- $u(t) = x’’^{des}(t)+K_ve’(t)+K_pe(t)+K_i\int_0^t{e(\tau)d\tau}$
- code Here
- PD control
- State Estimation
- Week2
- rotation matrix
- is orthogonal matrix
- all vector is 1
- $R^{-1} = R^T$
- rotation matrix
- Week 1
Ubuntu chromedriver remote browser
- apt install libnss3
-
fix [Service chromedriver unexpectedly exited. Status code was: 127]
-
- wget https://dl.google.com/linux/direct/google-chrome-stable_current_amd64.deb
- apt install ./google-chrome-stable_current_amd64.deb
- try to use nginx reserve proxy to handle 9200 port
location /chrome/ {
proxy_pass http://127.0.0.1:9222/;
proxy_http_version 1.1;
proxy_set_header Upgrade $http_upgrade;
proxy_set_header Connection "upgrade";
proxy_set_header Origin "";
proxy_set_header Host "[********]"; # cause chrome use host as ws address
sub_filter '/json' '/chrome/json';
sub_filter_types *;
sub_filter_once off;
}
what is the next
This request has been blocked; this endpoint must be available over WSS.

