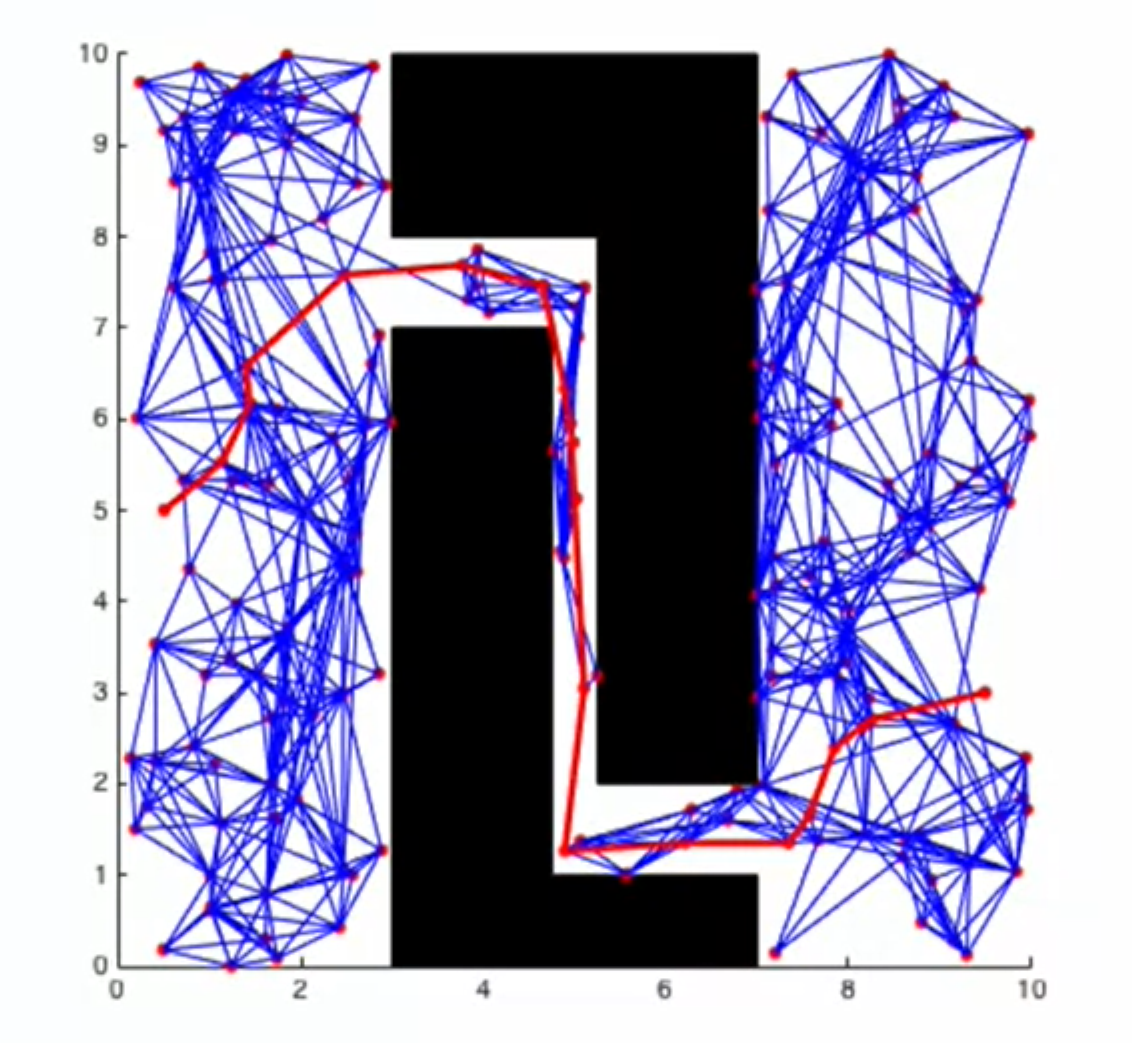
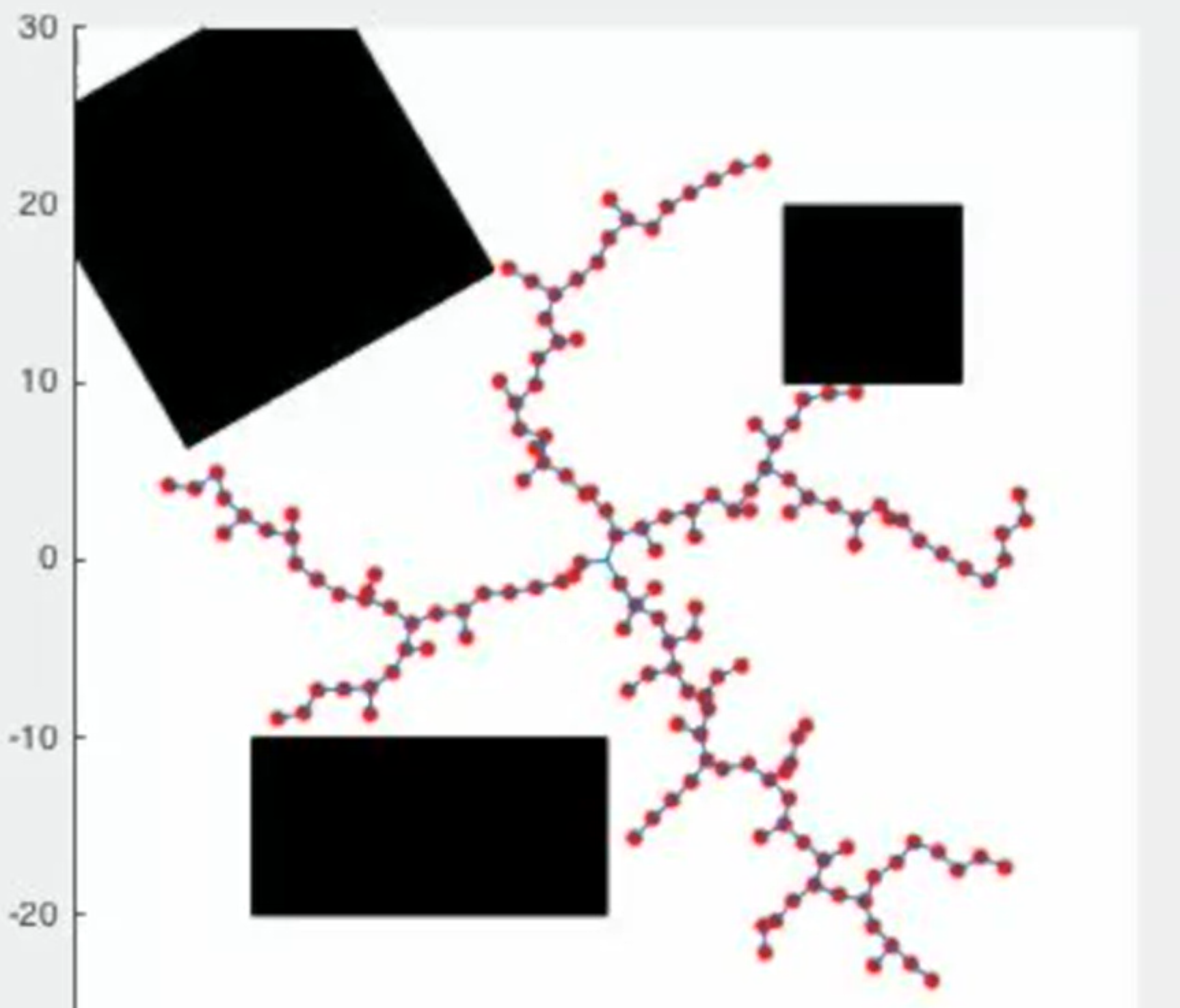
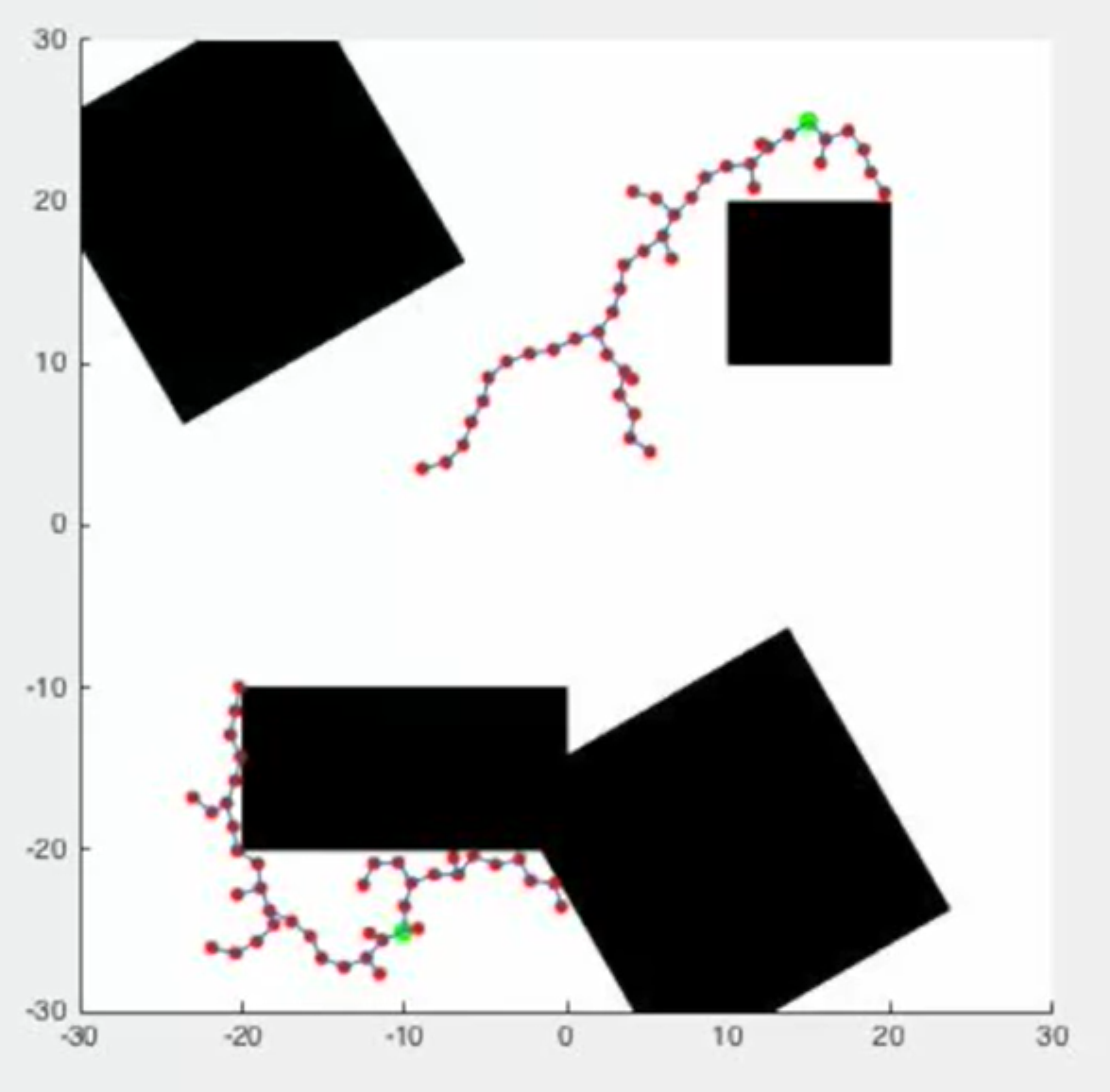
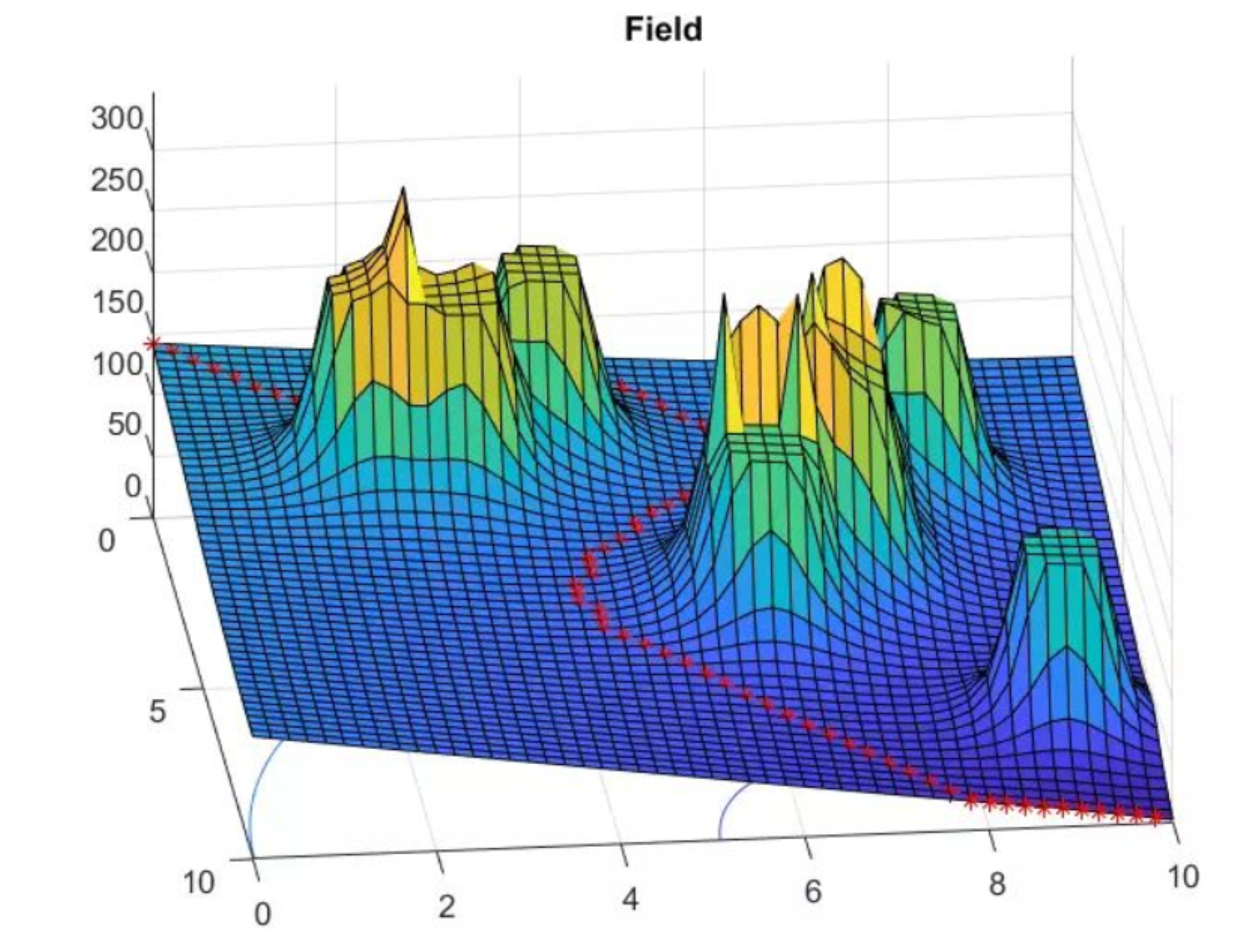
Robotics Motion Planning week3 and week4 August 11, 2021 less than 1 minute read week3 Probilalitic Road Map(PRM) Rapidy Exploring Random Tree(RRT) Method RRT 2 Week4 Artificial Potential Field[人造势场] 规划路径平滑化 将随机取点改为梯度下降法 Attractive Field[引力场] 将起点放在高处,终点放在低处 Repulsive Field[斥力场] 障碍物提供斥力 Reference 路径规划-人工势场法(Artificial Potential Field) - 半杯茶的小酒杯的文章 - 知乎 Twitter Facebook LinkedIn Previous Next
FruitNerf September 28, 2024 2 minute read FruitNeRF: A Unified Neural Radiance Field based Fruit Counting Framework
Unsigned Orthogonal Distance Fields: An Accurate Neural Implicit Representation for Diverse 3D Shapes May 13, 2024 less than 1 minute read