Coordinate System
| system |
image |
System hand |
Rotation hand |
Camera |
Order |
| OpenGL |
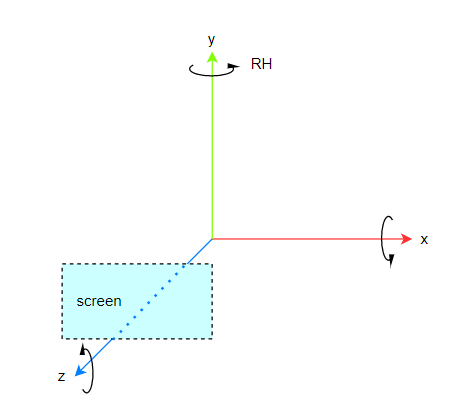 |
RH |
RH |
(0,0,-1) |
XYZ |
| Unity |
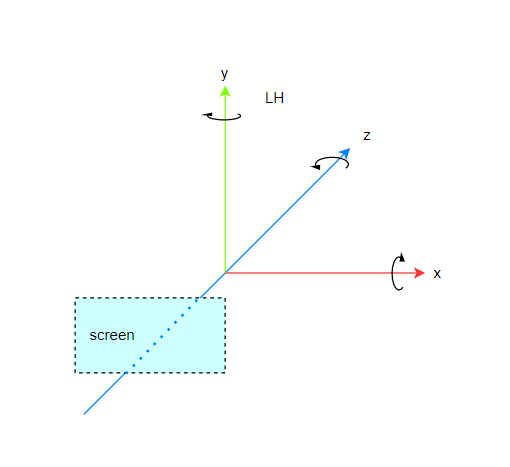 |
LH |
LH |
(0,0,1) |
YXZ(local) zxy(global) |
| pytorch3d |
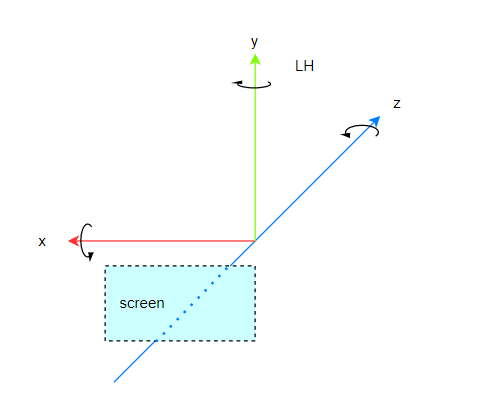 |
RH |
LH |
(0,0,1) |
XYZ |
| OpenCV、Open3D、Matterport3D、Colmap |
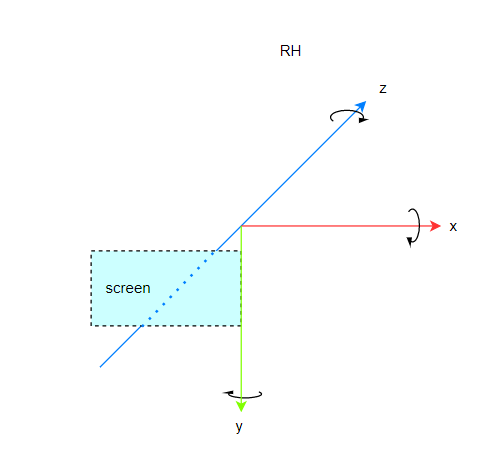 |
RH |
RH |
(0,0,1) |
XYZ |
| scipy |
|
RH |
LH |
|
XYZ xyz |
| blender |
|
RH |
RH |
|
|
Docs
- scipy
- unity
- rotation
- local rotation: intrinsic rotations, YXZ
- global rotation: extrinsic rotations, zxy
- order:
YXZ
- math
-
| Rodrigues: $r_{vert} = [x,y,z]$, $ |
r_{vert} |
2$表示旋转角度, $r{vert}$表示旋转向量 |
- 四元数与空间旋转
- cv2
- Rodrigues
cv2.Rodrigues(rotvec)[0]: 旋转向量到旋转矩阵cv2.Rodrigues(rotmatrix)[0]: 旋转矩阵到旋转向量
Conversion
| c r |
c t |
o r |
obj t |
obj scale |
status |
comment |
| 9.3,153.1,106.7 |
-43.2,99.3,83.8 |
0 |
0 |
0,-1,0 |
✔ |
c r = inv(mat)zxy,xyz=[-,-,+], t = xyz[+,+,-] |
| 9.3,153.1,106.7 |
0 |
0 |
43.2,-99.3,-83.8 |
0,-1,0 |
✔ |
c r = inv(mat)zxy,xyz=[-,-,+],o t = xyz[-,-,+] |
From unity to pytorch3d
- unity$(t=(x,y,z),r=(\theta_x,\theta_y,\theta_z))$
- pytorch3d$(t=(-x,y,z)),r=(-\theta_x,\theta_y,\theta_z)$
- code
- equivalence transformation
- euler to euler
verts *= [-1,1,1]
theta_x, theta_y, theta_z = angles
rotation=R.from_euler("yxz", [theta_y, theta_x, theta_z], degrees=True).as_matrix()
trans *= [-1,1,1]
- unity.quat to scipy.euler
# quat from unity [10,-120,70]
quat = [0.459144592,0.731702268,-0.347525775,-0.364724457]
euler = R.from_quat(quat).as_euler('zxy')
euler *= [1,-1,1]
rotation = R.from_euler('yxz', euler[[2,1,0]]).as_matrix()
Reference


