ICP 2D 收敛域检测
ang = np.linspace(-np.pi/2, np.pi/2, 320)
originate_point = np.array([ang, np.sin(ang)]).T
th = np.pi/2
rot = np.array([[np.cos(th), -np.sin(th)],[np.sin(th), np.cos(th)]])
# 旋转后的点
rotated_point = cv2.transform(originate_point[None, :], np.append(rot, np.array([[0.2], [0.3]]), axis=1))[0]
# 采样
sample_rotated_point = rotated_point[sorted(np.random.choice(b.shape[0], 10, replace=False)), :]
- 其中
rot为旋转矩阵
$M(\theta) = \begin{bmatrix}
\cos(\theta)&-\sin(\theta)\\
\sin(\theta)&\cos(\theta)\\
\end{bmatrix}
= exp\bigg(\begin{bmatrix}
0&-\theta\\
\theta&0
\end{bmatrix}\bigg)$0.2, 0.3为平移向量
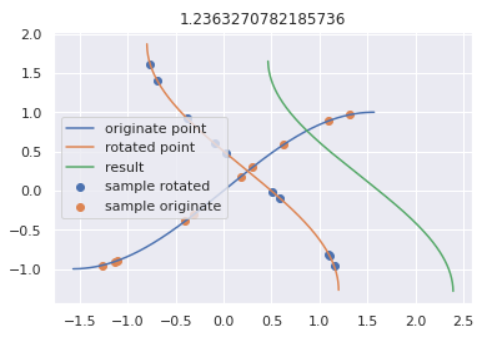
- 较差的结果
- param
sample_size=10, init_pose_x=.9, init_pose_y=0.9, init_pose_theta=1.7
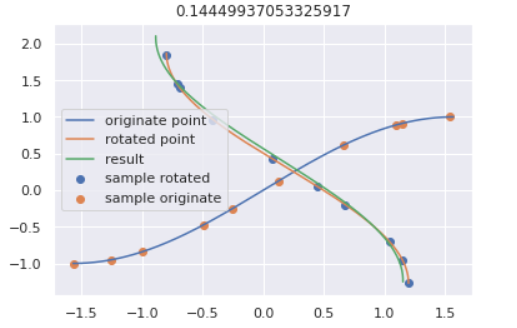
- 较好的结果
- param
sample_size=10, init_pose_x=.1, init_pose_y=.3, init_pose_theta=np.pi/2.2
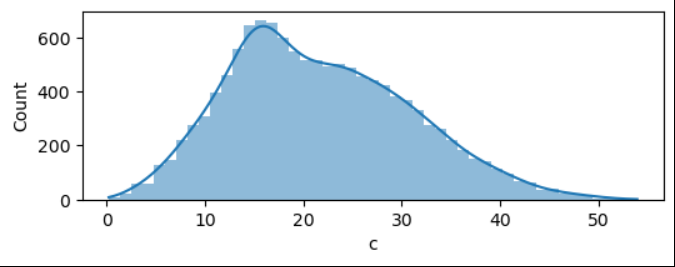
- 尺度效应明显
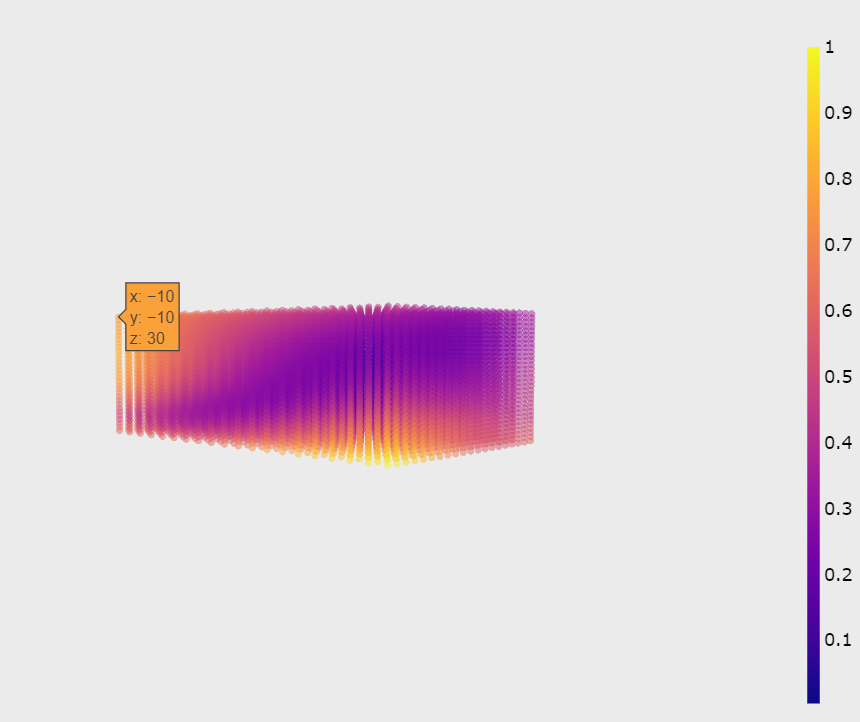
- 收敛场
- 未归一化
cost = norm(b, res)color=cost/cost.max()sample_size=10init_pose_x=-1:0.1:1, init_pose_y=-1:0.1:1, init_pose_theta=0:0.1:pi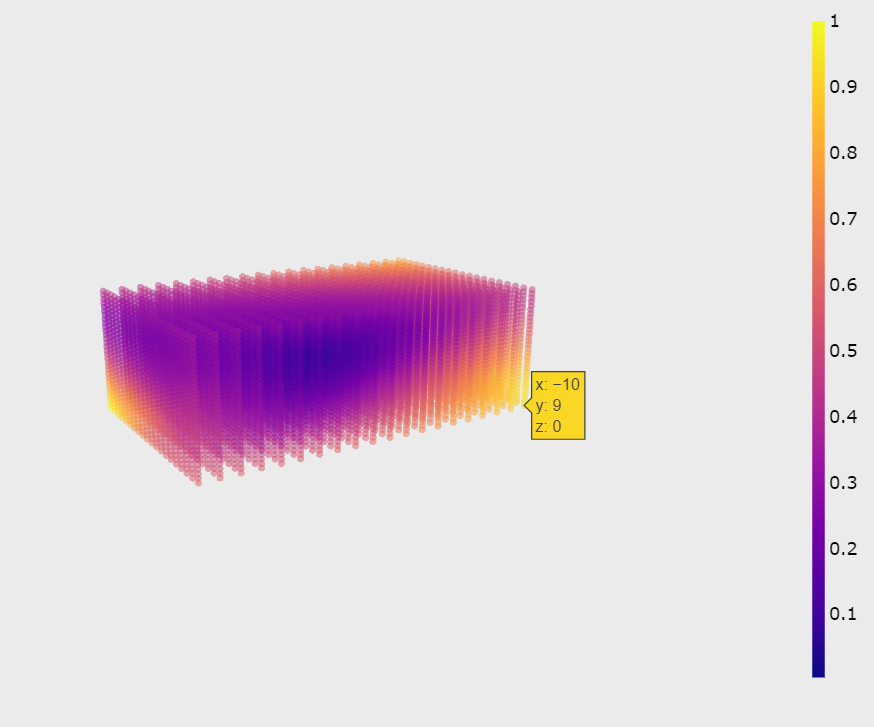
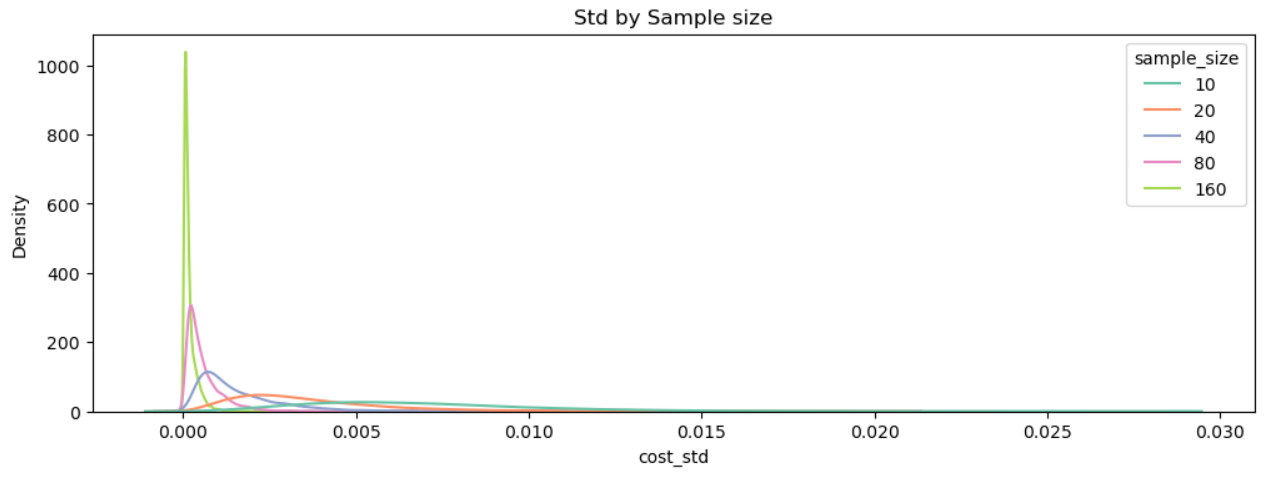
- Difference of sample size
- avg
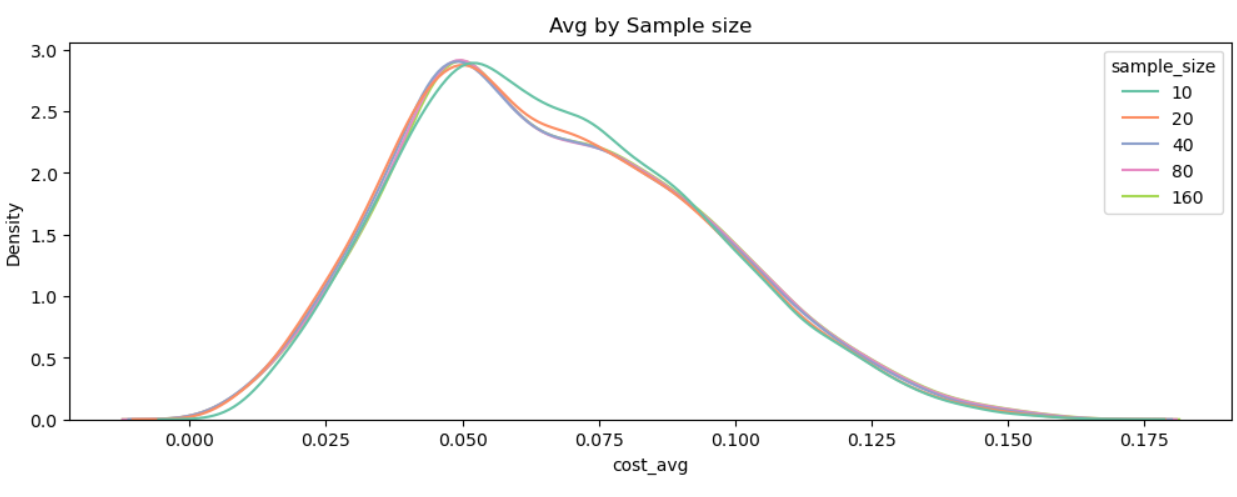
- std