ICP 2D and 3D
Point Cloud Registration[点云配准]
- Coarse Registration
- 粗配准
- Fine Registration
- 精配准
- Iterative Closest Point, ICP
- 精配准
ICP
OpenCV doc
2D ICP
2D Rotation Matrix
$$
M(\theta) = \begin{bmatrix}
\cos(\theta)&-\sin(\theta)\\
\sin(\theta)&\cos(\theta)\\
\end{bmatrix}
= exp\bigg(\begin{bmatrix}
0&-\theta\\
\theta&0
\end{bmatrix}\bigg)
$$
Code
def icp(a, b, init_pose=(0,0,0), no_iterations = 13):
src = np.array([a.T], copy=True).astype(np.float32)
dst = np.array([b.T], copy=True).astype(np.float32)
#初始化变换矩阵
#Tr[3*3] = [R[2*2], t[2*1]]
Tr = np.array([[np.cos(init_pose[2]),-np.sin(init_pose[2]),init_pose[0]],
[np.sin(init_pose[2]), np.cos(init_pose[2]),init_pose[1]],
[0, 0, 1 ]])
src = cv2.transform(src, Tr[0:2])
for i in range(no_iterations):
# 计算src到dst的最近点
nbrs = NearestNeighbors(n_neighbors=1, algorithm='auto').fit(dst[0])
distances, indices = nbrs.kneighbors(src[0])
# 用于估计变换矩阵
# For opencv>4.0.0
# estimateAffinePartial2D, 4 degrees of freedom
# estimateAffine2D, 6 degrees of freedom
T1, T2 = cv2.estimateAffinePartial2D(src, dst[0, indices.T])
# 利用估算矩阵进行变换
src = cv2.transform(src, T1)
Tr = np.dot(Tr, np.vstack((T1, [0,0,1])))
return Tr[0:2]
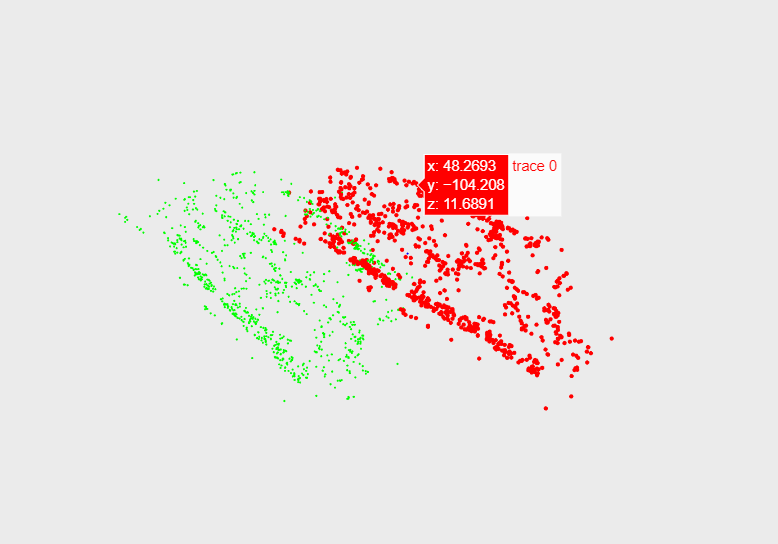
3D ICP
3D Rotation Matrix

Code
def icp(a, b, init_ang=(0,0,0), init_t=(0,0,0), no_iterations = 13):
src = np.array([a], copy=True).astype(np.float32) # n*3
dst = np.array([b], copy=True).astype(np.float32) # n*3
init_x, init_y, init_z = init_t
init_psi, init_phi, init_theta = init_ang
#Initialise with the initial pose estimation
Tr = np.array(externals.subs({
x: init_x,
y: init_y,
z: init_z,
psi: init_psi,
phi: init_phi,
theta: init_theta
}))
Tr = Tr.astype("float32")
src = cv2.transform(src, Tr[0:3])
for i in range(no_iterations):
nbrs = NearestNeighbors(n_neighbors=1, algorithm='auto').fit(dst[0])
distances, indices = nbrs.kneighbors(src[0])
# retval, out, inliers
T1,T2,T3 = cv2.estimateAffine3D(src, dst[0, indices.T])
src = cv2.transform(src, T2)
Tr = np.dot(Tr, np.vstack((T2,[0,0,0,1])))
print(np.linalg.norm(T2))
return Tr[0:3]