Fix light parameter
With Sobel Loss
RANDOM_UV = False
UV_SHAPE = 1024, 1024, 3
UV_TRAIN = False
AMBIENT_TRAIN: bool = True
DIFFUSE_TRAIN: bool = False
SPECULAR_TRAIN: bool = False
LOCATION_TRAIN: bool = False
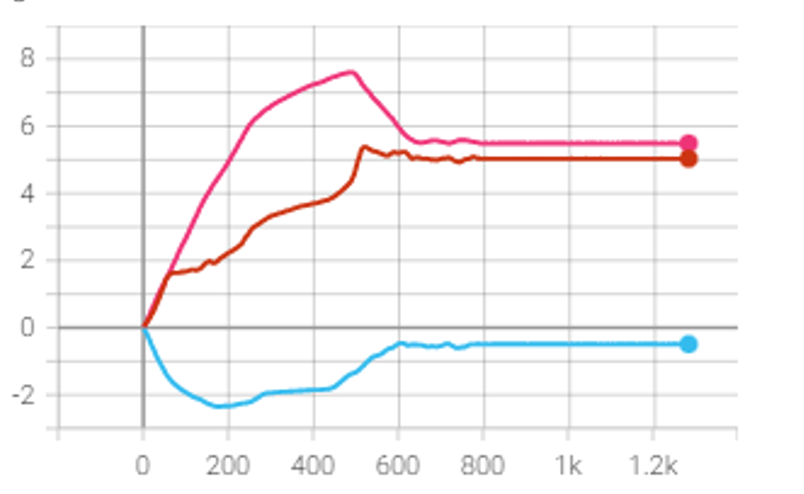
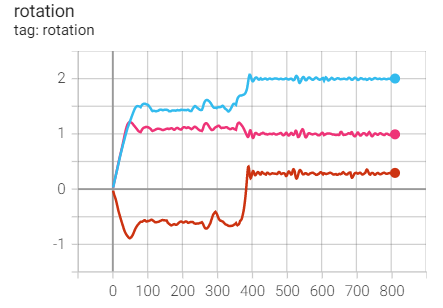
expect_value
euler_angles_to_matrix(rotation_mask.rotation[i] / 10, 'XYZ') @
euler_angles_to_matrix(torch.tensor([-.1, -.2, -.03], device=device), 'ZYX')
With Pixel Loss
RANDOM_UV = False
UV_SHAPE = 1024, 1024, 3
UV_TRAIN = False
AMBIENT_TRAIN: bool = True
DIFFUSE_TRAIN: bool = False
SPECULAR_TRAIN: bool = False
LOCATION_TRAIN: bool = False
expect_value
euler_angles_to_matrix(rotation_mask.rotation[i] / 10, 'XYZ') @
euler_angles_to_matrix(torch.tensor([-.1, -.2, -.03], device=device), 'ZYX')